
Connected Vehicles send location updates to the cloud while driving. This results in a series of waypoints or ‘breadcrumbs’ for each vehicle trip. By analyzing waypoint data from millions of trips transportation engineers can derive very valuable information about the use of the road network. Before engineers can use waypoint data to analyze road usage they need to determine for each waypoint on which road the vehicle was driving. This process is often referred to as ‘map matching’ the waypoints. In this process all road segments from a base map are loaded into memory and every waypoint is matched to the nearest road taking into account the heading of the vehicle.
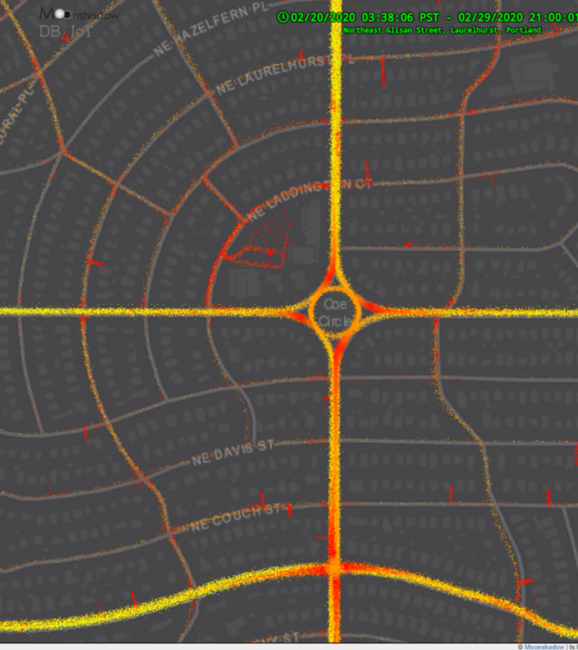
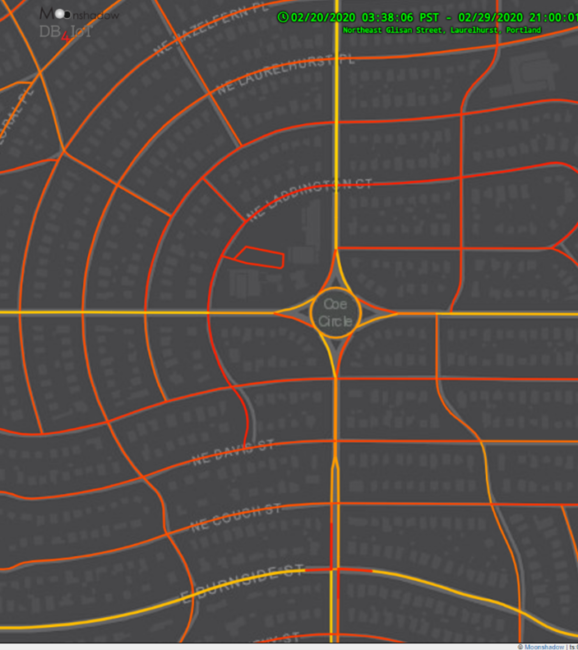
A monthly waypoint file for a medium size state can easily surpass ten billion records. Traditional map matching routines process 20,000 – 40,000 waypoints per second depending on the hardware. At this speed a ten billion waypoint file takes three to five days of server time to match to a map. For larger datasets the map matching process becomes a huge challenge; three months of data for a state like California can easily surpass 100 billion records and take a few months of server time to map match. For even larger areas and longer time periods the process can require dozens of servers humming for weeks or months. What’s more, every year more connected vehicles hit the road resulting in larger datasets that make this problem worse. Map matching delays projects as transportation engineers need to wait for the map matching process to complete before they can start using the data for analytics.
Moonshadow Mobile specializes in high-speed database technology for connected vehicle data and it has developed a tool, the Moonshadow Map Matcher, that can map match over one million waypoints per second on a fast server with SSD disks. This comes to over 90 billion records per day. A job that took five days can now be done in just a few hours. The one-million records per second speed includes disk I/O; the time it takes to read the waypoints from disk and save it back with the matched road segments. Moonshadow’s actual matching technology surpasses two million records per second if you don’t include disk I/O.
The Moonshadow Map Matcher is available as a C-library as well as a command-line tool to give data processing engineers the ability to fully integrate it into their existing data processing pipeline. The map matcher runs under Linux on X86/64 CPUs and is available for OpenStreetMap and other base maps.
The Moonshadow Map Matcher can also be integrated into near-real-time applications to speed up map matching live waypoint datastreams. Map matching an individual waypoint takes around 0.5 microseconds with Moonshadow’s technology so it can determine the road a vehicle is driving on roughly a half millisecond faster than traditional routines. This can be significant for in-vehicle applications but for server side use this speed difference itself is usually not important. There is, however, another important aspect of this speed. If the map matching is completed in 0.5 microseconds the CPU thread is open for other processes. Servers processing live datastreams usually have difficulty keeping up during peak hours. Freeing up compute cycles can be key to server stability.
Please contact Moonshadow Mobile if you like to learn more about high-speed map matching.
Contact Information:
Eimar Boesjes
Moonshadow Mobile, Inc.
541.343.4281

{kind=link}